Vision
The vision is among the vital things which is required for the robot to play soccer. The object detections and the calibration are performed here.
In our project we have the following under the vision :
1. Fish eye calibration
2. color calibration
3. Ball and field detection
4. Goal detection
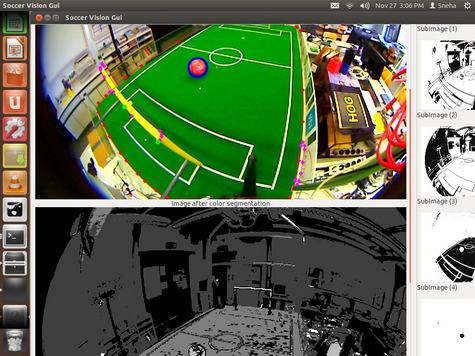
The calibration is done by using look-up tables (lut) which defines the yuv values for all the objects namely the ball, goal and the field. By defining a region of interest in the yuv color space this is easily achieved.
Object detection is done also based on the colors. A region around orange is taken for the ball, yellow for the goals and green for the field. Messages are passed which describe the position of the above mentioned objects in terms of undistorted image coordinates.