Vision
Für die optische Erkennung von Objekten auf dem Spielfeld (Ball, Tore, Linien, Gegner) wurden zwei Konfigurationen entwickelt. Eine erste Variante wurde vom Nimbro-Team der Universität Bonn bereitgestellt. Sie besteht aus einer Logitech Kamera mit einem Fischaugenobjektiv (ca. 185° Blickfeld), welche auf einem kleinen Motor für die Kopfdrehung befestigt wurde. Unabhängig davon wurde ein komplexeres stereoskopisches Erkennungssystem mit zwei USB-RGB-Kameras (1280x1024 Pixel), welche in einem Abstand von 12 cm auf einer festen Halterung platziert sind, gebaut. Die Halterung kann man schwenken, kippen und um die Mittelachse des Blickfelds drehen.
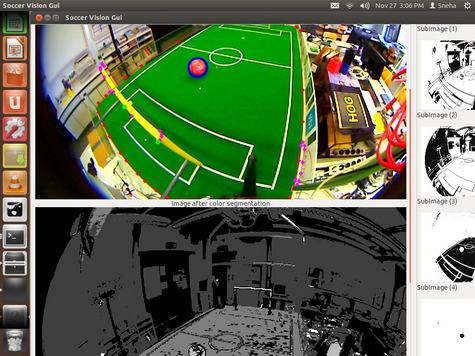
Als Ausgangspunkt wurde der Objekterkennungsteil der Software des Nimbro-Teams für das Ubuntu-Linux, welches auf dem Odroid-XU läuft, adaptiert. Mit dieser Konfiguration liefert es eine einfache Farbkalibrierung und erkennt danach verlässlich den Ball, das Spielfeld und die Tore. Ein anderer wichtiger Aspekt dieser Arbeit war es, mit dem ROS-Framework vertraut zu werden.
Auf diese Art und Weise konnte die Kommunikation mit der Java-Software, welche die Anpassung und den Entscheidungsprozess bereitstellt, eingerichtet werden. Die Weltkoordinaten des Balls konnten mit Zentimeter-Auflösung ermittelt werden. Ohne jede Optimierung konnte eine Bildfrequenz von 10 Hz erreicht werden.
Unabhängig von der Nimbro- und ROS-basierten Ermittlungen auf dem Odroid-XU wurde die weiterführenden Arbeiten mit OpenCV ausgeführt. Dies war zum Beispiel bei der geometrischen Kalibrierung des Fischaugenobjektivs mit dem klassischen Schachbrett Ansatz oder bei den Linienerkennungsmethoden, welche mehr auf Form als auf Farbmerkmalen beruhen, der Fall. Für grundlegende Fragen ist ein komplettes verkleinertes Spielfeld mit guten Möglichkeiten zur Kontrolle der Lichtverhältnisse verfügbar. In der vollen Größe wurde ein halbes Spielfeld aufgebaut, welches abhängiger von den Umgebungslichtverhältnissen ist.