Für das Team Magma um Professor Klaus Dorer ist es bereits das sechste Mal, für Roboter "Sweaty" dagegen ist es eine Premiere. Neben den WM-erfahrenen Robotern der 3-D-Simulationsliga tritt damit zum ersten Mal auch ein echter Roboter an: "Sweaty" ist in seiner Klasse, der "Adult Size", neben drei Robotern aus China, Taiwan und den USA der einzige Europäer. Die WM findet vom 19. bis 25. Juli statt.
In der 3-D-Simulationsliga werden die elf simulierten zweibeinigen Roboter der Hochschule unter anderen gegen Mannschaften aus Brasilien, Japan, China und den Vereinigten Staaten spielen. "Nach einem hervorragendem siebten und vierten Platz in den vergangenen beiden Jahren wollen wir es endlich aufs Treppchen schaffen", gibt sich Klaus Dorer hoffnungsvoll.
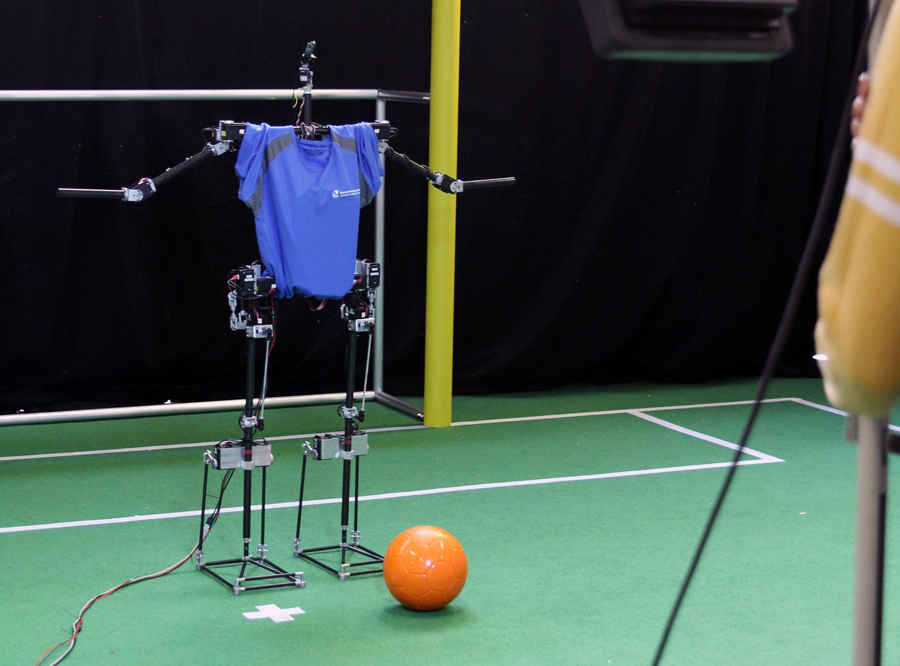
Premiere für "Sweaty"
Eine Premiere ist die WM-Teilnahme von Roboter "Sweaty". "Er ist weltweit der erste Roboter, der seine Motoren durch Verdunstung kühlt: er schwitzt", berichtet Teamleiter Professor Ulrich Hochberg nicht ohne Stolz. Und auch sonst unterscheidet er sich deutlich von seinen Kontrahenten: Die Motoren sitzen nicht, wie sonst bei Robotern üblich, in den Gelenken, sondern bewegen - ähnlich wie beim Menschen - über "Verlängerungen" die Beine. "Dadurch lassen sich die Kräfte der Motoren optimal dosieren, ohne dass das Gewicht des ganzen Roboters auf den Motoren und ihren Getrieben lastet", so Hochberg.
Königsklasse der zweibeinigen Roboter
Der Roboter tritt in der Königsklasse der zweibeinigen Roboter an, in der "Adult Size". In dieser Klasse kicken Roboter, die zwischen 1,30 und 1,80 Meter groß sind. "Sweaty" misst ein bisschen mehr als 1,40 Meter und bringt 10,1 Kilogramm auf die Waage - im Vergleich zu seinem Kontrahenten aus den USA - dieser wiegt knapp 50 Kilogramm - ein echtes Leichtgewicht. "Gut, dass in dem Wettbewerb Bodychecks verboten sind", witzelt Hochberg. "Da hätte unser Sweaty schlechte Karten." Vor der Mannschaft aus Offenburg liegt nun noch ein hartes Training: "Denn es gibt nicht viele Roboter, die autonom laufen können."
Drei Teams arbeiten zusammen
"Sweaty" wird gleich von drei Teams aus zwei Fakultäten entwickelt. Mechanik und Motorik werden vom Team um Professor Hochberg im Bereich Maschinenbau und Verfahrenstechnik konstruiert und gebaut. Die Bildverarbeitung übernimmt das Team um Professor Michael Wülker, das dafür sorgt, dass Sweaty den Ball, die Gegner und das Tor bei unterschiedlichen Lichtverhältnissen gleich fünfzehnmal pro Sekunde erkennt. Das Team um Professor Dorer aus der Fakultät Elektrotechnik und Informationstechnik kümmert sich um die Steuerungssoftware des Roboters, wo es gelang, 90 Prozent des Software-Codes für beide Teams zu verwenden.
Über die Robo-Cup-WM: Mit mehr als 2500 Teilnehmern ist die Robo-Cup-WM eine der größten Robotik-Veranstaltungen weltweit. In verschiedenen Ligen spielen simulierte und echte Roboter Fußball, orten Überlebende in Katastrophenszenarien oder servieren kühle Getränke in einer Wohnzimmerumgebung. Die Weltmeisterschaft findet direkt nach der echten Fußball-WM in Brasilien statt.
Im Internet:
- Robo-Cup-WM: www.robocup2014.org
- Simulation: robocup.hs-offenburg.de
- Sweaty: sweaty.hs-offenburg.de