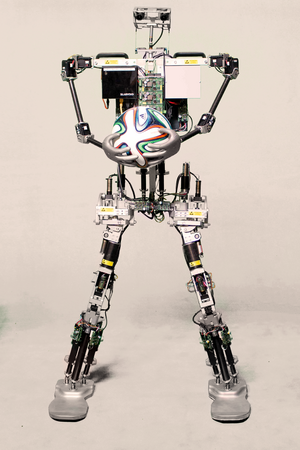
Sweaty (2016)
Eckdaten
Roboter Name: | Sweaty |
Größe des Roboters: | 165 cm |
Gewicht des Roboters: | 21 kg |
Schrittgeschwindigkeit | 0,2 m/s |
Anzahl der Freiheitsgrade: | 23 |
Motortyp: | Dynamixel MX-106, MX-64, Volz |
Benutzer Sensortyp: | Logitech C905, modifizierte Linse: 1,5” / Brennweite 1,55 mm, Sichtfeld 185° (teilweise verdeckt, letztlich 180°) |
Rechner: | 2x i7 BRIX-CORE-4770R / 3.9 GHz 23x STM32F4 |
Schulterhöhe: | 117 cm |
Schulterbreite: | 54 cm |
Hüfthöhe: | 75 cm |
Rumpfgröße: | 38 cm |
Armlänge: | 50 cm |
BUS-Systeme: | Ethernet 2x CAN 1x USB, I2C und SPI 1x RS-485 |
Batterie: | 2 LiPo 7S1P 4Ah 80C |